
Abstract
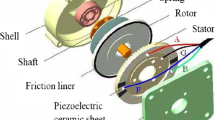
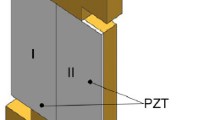
Existing rotary ultrasonic motors operating in extreme environments cannot meet the requirements of good environmental adaptability and compact structure at same time, and existing ultrasonic motors with Langevin transducers show better environmental adaptability, but size of these motors are usually big due to the radial arrangement of the Langevin transducers. A novel dual driving face rotary ultrasonic motor is proposed, and its working principle is experimentally verified. The working principle of the novel ultrasonic motor is firstly proposed. The 5th in-plane flexural vibration travelling wave, excited by the Langevin transducers around the stator ring, is used to drive the rotors. Then the finite element method is used in the determination of dimensions of the prototype motor, and the confirmation of its working principle. After that, a laser Doppler vibrometer system is used for measuring the resonance frequency and vibration amplitude of the stator. At last, output characteristics of the prototype motor are measured, environmental adaptability is tested and performance for driving a metal ball is also investigated. At room temperature and 200 V(zero to peak) driving voltage, the motor’s no-load speed is 80 r/min, the stalling torque is 0.35 N·m and the maximum output power is 0.85 W. The response time of this motor is 0.96 ms at the room temperature, and it decreases or increases little in cold environment. A metal ball driven by the motor can rotate at 210 r/min with the driving voltage 300 V(zero to peak). Results indicate that the prototype motor has a large output torque and good environmental adaptability. A rotary ultrasonic motor owning compact structure and good environmental adaptability is proposed, and lays the foundations of ultrasonic motors’ applications in extreme environments.
Similar content being viewed by others

References
SASHIDA T. Motor device utilizing ultrasonic oscillation: US, 4562374[P/OL]. 1984-05-16[1985-12-31]. http://www.google.com.hk/patents?hl=zh-CN&lr=&vid=USPAT4562374&id=v2QyAAAAEBAJ&oi=fnd&dq=Motor+device+utilizing+ultrasonic+oscillation&printsec=abstract#v=onepage&q=Motor%20device%20utilizing%20u ltrasonic%20oscillation&f=false.
SASHIDA T, KENJO T. An introduction to ultrasonic motors[M]. Oxford: Clarendon Press, 1993.
SHERRIT S. Smart material/actuator needs in extreme environments in space[C]//Proceedings of the SPIE Smart Structure Conference, San Diego, CA, May 20, 2005: 335–346.
UEHA S, TOMIKAWA Y. Ultrasonic motors theory and applications[M]. New York: Oxford Science Publications, 1993.
ZHAO C S. Ultrasonic motors technologies and applications[M]. Beijing: Science Press, 2010.
UCHINO K. Piezoelectric actuator and ultrasonic motors[M]. Boston, MA: Kluwer Academic Publishers, 1997.
HU J H, NAKAMURA K, UEHA S. An analysis of a noncontact ultrasonic motor with an ultrasonically levitated rotor[J]. Ultrasonics, 1997, 35(6): 459–467.
HU J H, NAKAMURA K, UEHA S. A noncontact ultrasonic motor with the rotor levitated by axial acoustic viscous force[J]. Electronics and Communications in Japan (Part III), 1999, 82(4): 56–63.
IULA A, PAPPALARDO M. A high-power travelling wave ultrasonic motor[J]. IEEE Transactions on Ultrasonics, Ferroelectrics, and Frequency Control, 2006, 53(7): 1344–1351.
IULA A, CORBO A, PAPPALARDO M. FE analysis and experimental evaluation of the performance of a travelling wave rotary motor driven by high power ultrasonic transducers[J]. Sensors and Actuators A: Physical, 2010, 160(1–2): 94–100.
IULA A, BOLLINO G. A Travelling wave rotary motor driven by three pairs of Langevin transducers[J]. IEEE Transactions on Ultrasonics, Ferroelectrics, and Frequency Control, 2012, 59(1): 121–127.
SATONOBU J, FRIEND J R, NAKAMURA K, et al. Numerical analysis of the symmetric hybrid transducer ultrasonic motor[J]. IEEE Transactions on Ultrasonics, Ferroelectrics and Frequency Control, 2001, 48(6): 1 625–1 631.
JIN J M, ZHAO C S. A novel travelling wave ultrasonic motor using a bar shaped transducer[J]. Journal of Wuhan University of Technology: Materials Science Edition, 2008, 23(6): 961–963.
LIU Y X, CHEN W S, FENG P, et al. A square-type rotary ultrasonic motor with four driving feet[J]. Sensors and Actuators A: Physical, 2012, 180: 113–119.
LIU Y X, LIU J K, CHEN W S, et al. A cylindrical traveling wave ultrasonic motor using circumferential composite transducer[J]. IEEE Transactions on Ultrasonics, Ferroelectrics, and Frequency Control, 2011, 58(11): 2 397–2 404.
LIU Y X, CHEN W S, LIU J K, et al. Actuating mechanism and design of a cylindrical traveling wave ultrasonic motor using cantilever type composite transducer[J]. PLoS ONE, 2010, 5(4): e10020.
LIU Y X, CHEN W S, LIU J K, et al. A cylindrical traveling wave ultrasonic motor using longitudinal and bending composite transducer[J]. Sensors and Actuators A: Physical, 2010, 161(1–2): 158–163.
MORITA T, NIINO T, ASAMA H. Rotational feedthrough using ultrasonic motor for high vacuum condition[J]. Vacuum, 2002, 65(1): 85–90.
PETIT L, GONNARD P. A multilayer TWILA ultrasonic motor[J]. Sensors and Actuators A: Physical, 2009, 149(1): 113–119.
SHI Y L, LI Y B, ZHAO C S, et al. A new type butterfly-shaped transducer linear ultrasonic motor[J]. Journal of Intelligent Material Systems and Structures, 2011, 22(6): 567–575.
OR S W, CHAN H L W, LO V C, et al. Dynamics of an ultrasonic transducer used for wire bonding[J]. IEEE Transactions on Ultrasonics, Ferroelectrics, and Frequency Control, 1998, 45(6): 1453–1460.
XIAN X J, LIN S Y. Study on the compound multi-frequency ultrasonic transducer in flexural vibration[J]. Ultrasonics, 2008, 48(3): 202–208.
Author information
Authors and Affiliations
Corresponding author
Additional information
This project is supported by National Natural Science Foundation of China(Grant Nos. 51205203, 51275228, 51075212, 91123020), Science and Research Foudotion, Nanjing University of Aeronautics and Astronautics(Grant Nos. 56YAH12015, NZ2010002, S0896-013), Innovation and Entrepreneurship Program of Jiangsu, and Priority Academic Program Development of Jiangsu Higher Education Institutions
LU Xiaolong, born in 1984, is currently a PhD candidate at State Key Laboratory of Mechanics and Control of Mechanical Structures, Nanjing University of Aeronautics and Astronautics, China. He received his ME degree from Southeast University, China, in 2009. His research interests include design and experiments of ultrasonic motors driven in extreme environments.
HU Junhui, born in 1965, is currently a professor at Nanjing University of Aeronautics and Astronautics. He received his PhD degree from Tokyo Institute of Technology, Tokyo, Japan, in 1997, and BE and ME degrees in electrical engineering from Zhejiang University, Hangzhou, China, in 1986 and 1989, respectively. He is a Chang-Jiang distinguished professor of Ministry of Education of China, director of Precision Driving Lab at Nanjing University of Aeronautics and Astronautics (NUAA), and deputy director of State Key Laboratory of Mechanics and Control of Mechanical Structures, China.
YANG Lin, born in 1981, is currently a teacher at State Key Laboratory of Mechanics and Control of Mechanical Structures, Nanjing University of Aeronautics and Astronautics, China. He received his PhD degree from Nanjing University of Aeronautics and Astronautics, China, in 2010. His research interests include hybrid working mode ultrasonic motor design and fabrication.
ZHAO Chunsheng, born in 1938, is currently a professor at State Key Laboratory of Mechanics and Control of Mechanical Structures, Nanjing University of Aeronautics and Astronautics (NUAA), Nanjing, China. He is the founder of Precision Driving Laboratory at NUAA, and an academician of Chinese Academy of Sciences. He holds 54 patents in China and has published more than 400 papers in the field of ultrasonic motors.
Rights and permissions
About this article
Cite this article
Lu, X., Hu, J., Yang, L. et al. Principle and experimental verification of novel dual driving face rotary ultrasonic motor. Chin. J. Mech. Eng. 26, 1006–1012 (2013). https://doi.org/10.3901/CJME.2013.05.1006
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.3901/CJME.2013.05.1006